
侨报网
>
时政
神十三航天员首次出舱安装的机械臂转接头 将打通“任督二脉”
- 时间: 1636338730007
- 来源: 侨报网综合
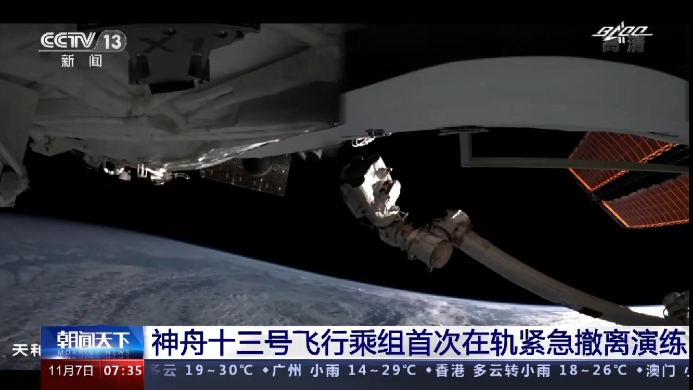
【侨报网综合讯】7日,神舟十三航天员在首次出舱活动中,顺利完成机械臂级联装置安装工作,为后续实现“擎天巨臂”组合打下基础。
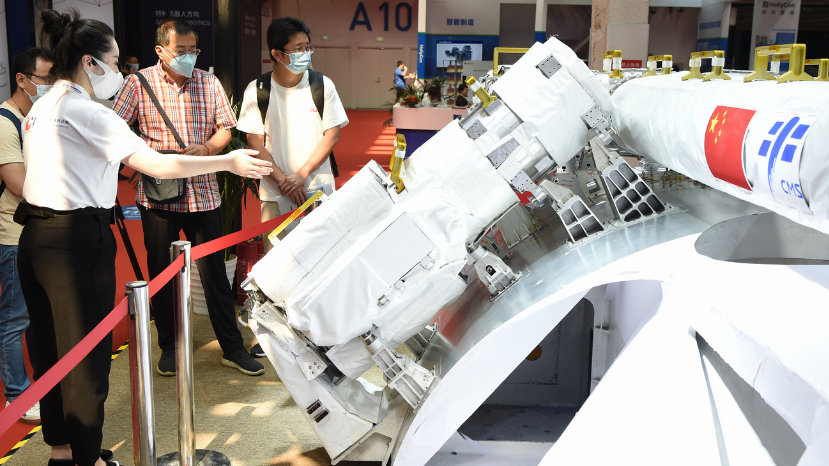
9月10日,2021世界机器人大会在北京开幕。图为工业机器人及核心零部件、物流机器人展区展示的“大型空间站机械臂”,展台工作人员正在为观众讲解。(图片来源:中新社)
中新网报道,据航天科技集团五院空间站机械臂飞控负责人高升介绍,空间站机械臂由核心舱机械臂(大臂)和“问天”实验舱机械臂(小臂)组成。
7日,航天员翟志刚完成了机械臂级联装置安装。过程中,首先安装在核心舱舱壁上的悬挂装置带有巧妙的抱爪结构,用于捕获和存放双臂组合转接件,并为它提供供电保证。完成悬挂装置安装后,翟志刚轻推双臂组合转接件进入卡口位置,悬挂装置在指令遥控下,通过抱爪结构准确地将转接件抓住,并将其“拥入怀中”。
那么,双臂组合转接件和悬挂装置到底是什么关系呢?据航天科技集团五院空间站机械臂悬挂装置主管设计师高翔宇介绍,双臂组合转接件好比“刀剑”,悬挂装置则好比“刀鞘”。未来,当两个空间站机械臂开展对接工作时,核心舱机械臂(大臂)将主动探向双臂组合转接件,通过末端视觉相机识别靶标,将其从悬挂装置上精准取出,进而完成与“问天”实验舱机械臂的组合,形成更长、更稳定的灵巧型空间机器人。
“届时,空间站机械臂可达范围直接拓展为14.5米,活动范围可直接覆盖空间站三个舱段,随时实现对空间站舱体表面的巡检。”高翔宇说。
“未来,在空间站完成三舱组合后,航天员出舱任务大部分将由组合臂的形式完成。”航天科技集团五院空间站机械臂双臂组合转接件主管设计师朱超说。(完)



继续加载...